基于虛擬現實技術的探究式學習環境設計與效果研究
2020-04-01 15:09:03張雪羅恒李文昊左明章
電化教育研究 2020年1期
張雪 羅恒 李文昊 左明章


[摘? ?要] 虛擬現實技術的迅速發展使越來越多的學者開始探索其在教育領域的創新應用。然而,現階段尚缺乏將虛擬現實技術特性和教學理論有機整合的設計研究和效果檢驗。針對該研究的局限性和我國兒童交通安全教育的具體需求,文章對虛擬現實技術支持下的探究式交通安全教育模式進行了系統設計,結合實例分析了如何將真實性、開放探索性、關鍵決策點、問題空間和專家反饋等探究式學習原則應用在虛擬現實學習環境的情境、任務、交互和反饋設計中。為進一步檢驗其教學效果,文章開展準實驗研究,對湖北省城市、城郊和農村地區三所小學的79名兒童在該學習環境中的學習表現和體驗進行了定量和定性分析。研究結果表明,該學習環境能有效診斷并改善兒童的危險道路行為,如橫沖馬路、綠燈閃爍時過馬路、不檢查交通狀況等,且城鄉環境和年級水平對兒童交通行為表現和學習效果沒有顯著影響。研究結果對改革我國兒童交通安全教育模式、提升教育質量有一定的指導意義。
[關鍵詞] 虛擬現實; 探究式學習; 道路安全教育; 教學設計; 準實驗研究
[中圖分類號] G434? ? ? ? ? ? [文獻標志碼] A
一、引? ?言
虛擬現實技術(Virtual Reality Technology,簡稱VR)是一種創建和體驗交互式三維虛擬環境的計算機仿真技術:虛擬環境為用戶提供視覺、聽覺、觸覺等多重感官刺激,用戶可以通過頭盔顯示器、數據手套、體感控制器等傳感設備在虛擬環境中實現自然交互[1-2]。Burdea和Coiffet將沉浸性(Immersion)、交互性(Interaction)和想象性(Imagination)歸納為VR技術的基本特征,也稱3I特征[3]。Dalgarno和Lee在3I特征的基礎上進一步分析了VR技術的5個學習能供性,分別是發展空間知識表征、提供探究式學習任務、提升學習動機與投入、促進情境化學習與知識遷移和豐富協作學習模式[4]。Shin從情感維度分析了虛擬現實環境對培養學習者同理心和代入感的積極影響,強調“共情感”對學習交互和學習體驗的重要性[5]。虛擬現實技術不斷完善的技術特性和持續降低的應用成本,使其成為2018高教版《地平線報告》預測的六項關鍵教育技術之一[6]。
當前,教育類文獻中對VR技術的研究呈快速增長趨勢。研究熱點從早期對情境感知、三維建模、人機交互等關鍵技術的探討逐漸轉向VR在具體學科中的應用實踐和效果評估的研究[7]。Merchant等人通過對VR文獻中69項實驗研究結果進行元分析發現,VR技術總體上對學習結果有促進作用[8]。然而,現階段國內外研究仍存在以下幾方面的局限性:(1)文獻中的VR教學環境多為基于投屏電視、紙板眼鏡和電腦仿真的半沉浸式環境,應用全沉浸式VR技術(如VR頭盔、體感交互等)的教學干預較為少見;(2)大多數量化研究是在嚴格控制的實驗室環境中進行的,而且質性研究偏少,缺少對教學過程和學習體驗深入細致的分析與解讀;(3)缺乏將VR技術特性和教學設計理論有機整合的設計研究,研究結果對教學實踐的指導意義有限。針對當前相關研究的局限性,本研究將全沉浸式VR技術與探究式學習理論有機整合,提出了一種適用于VR環境的探究式學習模式,并采用量化和質性相結合的方法檢驗該教學模式的教學效果。通過論證和檢驗VR教學環境中情境設計、任務設計、交互設計、反饋設計等教學策略,進一步發展和完善了基于VR技術的探究式學習理論。
二、探究式學習相關理論
(一)探究式學習
探究式學習(Inquiry-Based Learning)是一種以學生為中心的建構主義教學方法,引導學生在開放問題情境中積極主動地探索,實現自我導向、歸納演繹、構建知識。探究式學習的兩種常見形式是問題教學(Problem-Based Learning)和案例教學(Case-Based Instruction),其本質都是圍繞情境問題開展探究式學習活動,從而培養學生分析問題、解決問題和知識遷移等高階思維能力。
1. 問題教學
問題教學旨在引導學生在分析任務的過程中發現問題,從而發展學生靈活應用特定知識和概念來解決問題的能力。Jonassen提出問題教學是一個完整的學習空間,包括問題空間和相關的概念空間,展示了如何解決問題的過程[9]。每個問題都存在一個問題空間,它指在任務環境下用于解決問題中的矛盾沖突所涉及的特定知識、規則和方法,強調考查學生面對任務環境的內部表征。具體而言,問題空間包括兩種結構:任務環境的結構和信息處理系統的結構。每一個問題形式為[A=>B]的向量元組,它包括三個組成部分,其中A和B分別代表問題的起始狀態和終止狀態,而“=>”表示從起始狀態到終止狀態所需的某種規則或方法。在此基礎上構建的任務環境結構包括七個特征[10]:(1)問題有一定的自由度和層次性;(2)問題規模大且復雜;(3)問題解決存在延遲或即時反饋;(4)有意圖的輸入和規范的輸出;(5)約束控制策略;(6)可能存在的干擾因素;(7)答案沒有對錯之分,需要個性化評估。將構成問題的三種成分作為常量,與任務環境的設計之間建立“解釋性聯系”,共同構成問題空間的設計。
2. 案例教學
案例即一個或者多個真實且復雜的事件或情景,通過案例中的人物活動或事件發展向案例分析者提供間接經驗。案例為分析者提供討論、反思、問題求解和應用理論的機會,其質量很大程度上影響著案例教學的質量。一個優秀案例應包含三個要素[11]:(1)真實問題情境描述,反映現實世界問題的復雜性,提升案例的真實感和沉浸感;(2)必要的反饋意見和專家評語,教師需在案例故事的關鍵決策點引導學生進行反思并提供指導意見;(3)多種媒體內容的呈現,信息技術為案例設計開發提供了更多可能性,基于視頻、音頻、圖片、動畫等多媒體呈現能充分展示案例問題的情境性和復雜性。
(二)探究式學習設計原則
通過對上述探究式學習相關文獻的梳理,本研究總結了五條探究式學習環境的設計原則,見表1,這些原則指導了VR支持的探究式學習環境的設計。
三、教學設計實例:基于VR的
兒童道路交通安全教育
(一)教學問題
世界衛生組織《2018全球道路安全現狀報告》指出,交通事故已成為全球兒童致死的首要原因[12]。中國每年有超過1.85萬名0~14歲兒童死于交通事故。同時,中國經濟的快速發展導致了農村向城市的大規模遷移和農村地區人口的機動化,無論是農村還是城市兒童都面臨著更大的交通安全風險。然而,當前我國中小學交通安全教育一般仍采用基于圖書和錄像的講授式教學,形式單一,方法落后,缺乏系統性、交互性和吸引力。改善我國兒童交通安全教育已經刻不容緩。而VR技術因其沉浸性、交互性和想象性特征,為創新交通安全教育模式、提升學習效果提供了可能。首先,VR技術能夠完全模擬和仿真現實道路交通場景,創建一個足夠真實又絕對安全的虛擬交通環境,有助于了解兒童對道路安全的認知誤區和行為習慣。其次,VR環境可控可靠,可以通過調整車速、路況、天氣、信號燈等參數豐富學習場景,為當地兒童提供量身定制的訓練體驗。最后,VR技術提供逼真的圖像、聲音等能大幅提高學習的趣味性和臨場感,允許兒童積極探索和重復練習。在已有教學環境無法滿足教學需求的情況下,利用VR技術構建學習環境、創設問題情境、拓展學習空間是可行的方法。基于此,本研究應用問題教學和案例教學等探究式學習方式,結合VR技術的學習能供性對交通安全教學模式進行設計。
(二)VR支持的探究式學習設計
本研究以探究式學習的設計原則為指導思想,充分發揮教師的專家指引作用,設計了如圖1所示的“探索—復盤—練習—反思”的基于VR的探究式學習模式。該模式強調學習環境中真實問題情境的創設,支持兒童在虛擬交通環境中進行自由探索,將復雜的交通任務分解為三個子任務作為關鍵決策點,每個子任務問題空間中初始狀態、目標狀態和交通規則明確,且加入了一定的干擾因素,教師在復盤和反思環節就兒童學習者的實際表現情況進行個性化引導,引導他們進行觀察分析、決策實踐和反思討論等高階思維活動,從而加深其對交通安全知識的深入理解、提高其交通知識的應用能力。以下從學習環境設計的四個要素(情境、任務、交互、反饋)分別闡述VR技術特性和探究式學習原則在該教學環境中進行整合的設計與具體實現方法。
1. 情境設計
本研究使用Unity 3D游戲引擎和Oculus Rift軟件開發工具包設計開發了一個可移動的全沉浸式虛擬環境。Unity 3D通過高級視覺和音頻效果快速創建和輕松部署VR應用程序,Oculus Rift通過其高分辨率頭戴式顯示器及兩個紅外傳感器實現大型跟蹤空間。如圖2所示,該情境設置允許參與者在跟蹤空間內自由漫游。創設的虛擬環境是基于城市中心道路交通實況構建的虛擬道路交通場景,包括4條街道、9條人行橫道和7個交通燈。在該環境中每個控制裝置都發生著現實行為,如車流車量、360度視角、光線明暗效果等使兒童能夠完全真實地感受到道路上的“危險”。但是,兒童可能會出于好奇或者追求刺激的心態故意嘗試錯誤的交通行為,如橫穿馬路、不走斑馬線或故意跑向倒退的車輛后面等。因此,為了不對錯誤的交通行為起到強化的作用,該VR環境的程序設定會及時制止錯誤行為的進一步發展,避免事故場面給兒童帶來的心理陰影。
情境設計所應用到的探究式學習設計原則包括:(1)真實性原則,利用VR技術的沉浸性特征呈現一個包含多種交通情境的高度仿真的虛擬世界;(2)開放探索原則,利用VR技術的交互性特征提供一個開放自由的交通道路探索空間。
2. 任務設計
本研究設計了“交通信號燈”的問題空間,如圖3所示。在該問題空間中設置了三個虛擬場景,分別是路口1“信號燈紅燈狀態同伴在馬路對面招手”、路口2“準備過馬路時綠燈開始閃爍”和路口3“信號燈綠燈狀態但有校車在倒車”。三個虛擬場景的位置分別對應三個關鍵的決策點,即立刻橫穿馬路還是等待綠燈時從斑馬線過馬路(C1)、綠燈倒計時閃爍時是原地等待還是快速通過(C2)、校車倒車時是橫穿馬路還是等待(C3)。每一個決策點都是具有明確始末狀態、程序規則和認知干擾的問題任務。以第三個“信號燈綠燈狀態但有校車在倒車”的決策任務為例:開始狀態是當兒童走近第三條馬路邊準備過馬路時校車開始倒退至斑馬線的位置;結束狀態是校車駛離斑馬線,兒童安全地穿過馬路;限定的規則是必須等校車倒車完成后且綠燈時才可穿過馬路;干擾因素即突然后退的校車。
整個問題空間中,兒童以第一人稱視角自由探索,具體的描述為:在放學回家的路上先后穿過三條馬路,即解決潛在的三個過馬路任務。另外,該虛擬環境凸顯實時定位兒童的行為狀態誘發事件的隨機性特征,表現在每一位兒童可能步行速度不同,即使在相同的場景下可能面對的狀況也不同,例如,有的兒童還未走到第二條馬路時信號燈就在閃爍,而有的兒童走到第二條馬路邊時信號燈才開始閃爍,接下來兒童的決策反應就有可能不同。
任務設計應用到的探究式學習設計原則包括:(1)問題空間原則,將安全教育教學場所置于具有明確始末狀態的道路交通實況中,參與者利用規定的交通規則安全通過“過馬路”的一系列子任務;(2)關鍵決策點原則,將學習交通道路安全知識置于有意義的決策任務中,參與者通過自主解決任務和反思他們的經驗來學習。
3. 交互設計
針對VR支持的交通安全教學環境中的交互設計,首先,體現在VR環境中程序設定的多個組件之間的交互,如行駛車輛與信號燈的交互、車輛之間的交互等是道路中的必要因素,有助于增進學習者的沉浸感。其次,體現在參與者本身與VR硬件設備進行的體感交互,外接式頭戴設備采用實時計算的虛擬視覺信號替代真實世界,使用戶產生身處現實世界的錯覺,而基于觸覺感知的動作捕捉系統,依靠移動控制器設備,能夠實時完成對虛擬角色的空間定位、動作同步與行為驅動,通過多種體感設備的整合帶給參與者綜合的沉浸式感知體驗。另外,體現在參與者與虛擬對象進行的交互,如圖4所示,主要通過與虛線場景中“同伴”的交互,引導參與者迅速進入虛擬角色。最后體現在參與者在虛擬環境中自由探索實時交互誘發事件的發生,如場景三發生“校車開始倒車”這一動作的前提是參與者走到第三條馬路邊準備過馬路誘發關鍵決策點(C3)這一任務。
交互設計應用到的探究式學習設計原則包括:(1)開放探索原則,表現在參與者能夠在環境中自由探索,并通過人機交互設計,為探索過程提供及時的結果反饋;(2)關鍵決策點原則,設計誘發決策的關鍵事件如同伴召喚、綠燈閃爍、校車倒車等的發生,提供任務指示,從而引發參與者做出決定并展示相關后果。
4. 反饋設計
在該學習環境中,學生成為真正的主動探究者,教師即引導者和訪談者。基于VR能夠重復提供完全相同的探索環境,本研究嘗試通過個性化重復練習的行為干預發展兒童在交通中安全穿越道路所需的復雜認知感知技能,具體做法是使學習者先后體驗兩次相同的虛擬交通道路場景,并安排教師與學習者的兩次交流促進兒童學習者更加全面、深刻地認識交通安全知識。第一階段,教師作為一名引導者,負責觀察學習者第一次自由探索期間的表現,并在結束后與其進行復盤引導,主要詢問場景中的具體行為,如“當你想去見你的同伴時,你能告訴我你所看到的一切嗎?當你走到第二條馬路的時候,你有注意到信號燈的顏色嗎?”等問題,該階段的主要目的是基于虛擬場景中的交通實況告訴他們這種情況下正確的行為是什么。第二階段,教師作為一名訪談者,了解學習者兩次體驗后的心理和行為變化,主要針對學習者對整個學習經歷的感受,如“你今天學到了什么,下次你過馬路時,你會做什么(你會應用你學到的東西)嗎”,該階段的主要目的是總結反饋學習到的交通安全知識并促進知識的遷移。
反饋設計應用到的探究式學習設計原則是專家反饋原則,通過第一輪的探索,教師找出兒童的錯誤交通行為及背后原因,并有針對性地提供個性化的指導教學,糾正錯誤交通概念和行為習慣,引導兒童反思和知識遷移。
四、VR支持的兒童道路交通安全
教育的效果分析
(一)教學實驗的開展
為檢驗基于VR的探究式學習環境的學習效果,本研究采用準實驗設計研究的方式,在湖北省不同地區的小學進行實驗研究。通過分層抽樣的方法選取了79名一年級至三年級的志愿者參與研究,其中,男生38人,女生41人;一年級學生26人,二年級學生26人,三年級學生27人。79名參與者分別來自三個不同的小學,其中,20名學生就讀于武漢市中心小學DXH,該學校的學生主要來自城市家庭,29名學生就讀于武漢市郊小學HLC,該學校主要招收農民工家庭的孩子,30名學生就讀于鄉鎮小學FHX,這是一所為當地農村家庭孩子提供教育的學校。因此,本研究將20名DXH參與者劃分為城市學生、29名HLC參與者劃分為農民工學生、30名FHX參與者劃分為農村學生。
實驗開展時,每個參與者的VR體驗持續約20分鐘,由4個階段組成。第一階段即第一次練習T1,參與者在安全的條件下探索虛擬現實環境,嘗試完成三個過馬路任務。與此同時,教師使用觀察清單記錄所有正確和錯誤的交通行為,并基于這些數據制定第二階段的訪談問題。第二階段,教師向參與者調查其交通行為背后的理由并針對性地向其提供安全指導。第三階段,參與者進行第二次練習T2并完成相同的過馬路任務。在第四階段進行了結束面談,參與者向教師講述了VR學習經歷并就整個體驗過程進行反思。
實驗結束后,研究人員對行為觀察和質性訪談兩類數據進行預處理。在表2所列的觀察清單中,教師在實驗觀察期間給出了初步評價,后來由兩名研究人員通過分析錄像加以核實來確保其有效性。該觀察清單采用0(否)和1(是)的二元評分對分布在3個過馬路任務中的5種正確交通行為進行量化,計算出參與者每個交通行為的平均得分(X_Bi,i = 1-5)和三個過馬路任務的平均得分(X_Ci,i= 1-3),并得出行為和任務的整體表現得分(X_B,X_C)。所有的得分都在0和1之間。
所有的量化數據轉化為IBM SPSS 20.0 統計格式的文件進行數據分析,通過重復測量方差分析對比參與者練習T1和練習T2前后的表現差異,以驗證基于VR的探究式兒童道路安全教育學習環境的教學效果。另外,研究人員也整理分析了所有參與者兩次訪談的質性數據,以調查參與者做出行為決策的原因以及在VR環境下的學習體驗。
(二)實驗結果分析
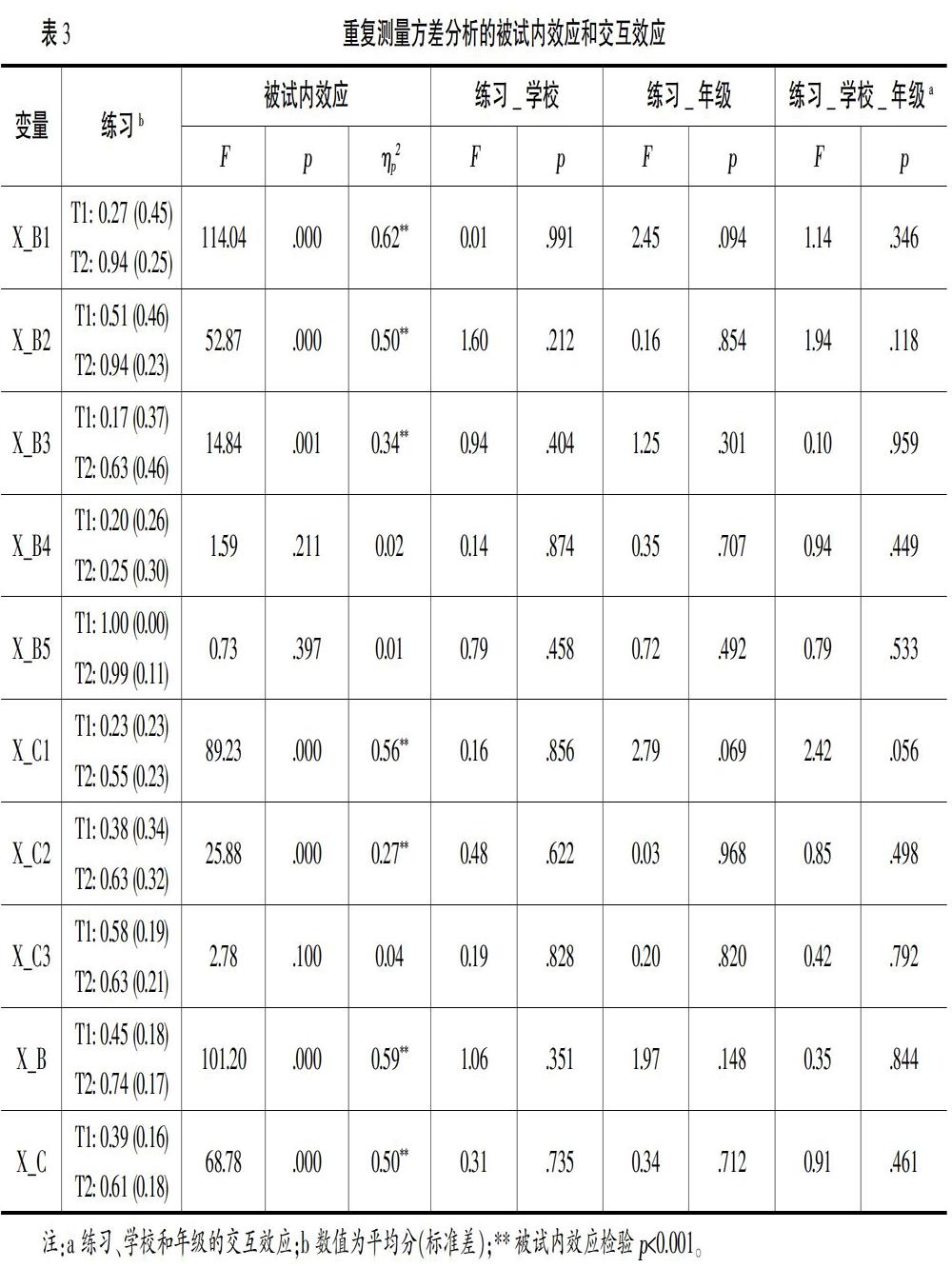
表3提供了兩次練習中兒童交通行為表現的描述性數據,并列出了被試內效應檢驗以及交互效應檢驗的關鍵統計數據。在五種交通行為表現方面,參與者在練習T1期間有三種行為的平均得分較低,包括“同伴召喚時沒有直接沖向馬路”X_B1=0.27,“信號燈閃爍時沒有直接過馬路” X_B3=0.17,以及“過馬路前立即檢查左側視線范圍內的交通狀況” X_B4=0.20。低于30%的正確率表明了普遍的危險交通行為,需要進行安全教育加以矯正。相較之下,所有參與者在“校車后退時沒有直接過馬路”行為上做出正確的決定(X_B5=1.00),說明兒童能夠很好地感知移動的車輛。此外,Kruskal-Wallis非參數性檢驗結果表明,兩次練習中兒童在五種行為表現和三個過馬路任務表現上均未受性別、年級和學校因素影響(p≥0.05)。
本研究中VR教學干預的實際教學效果是通過計算兒童交通行為和任務表現的被試內效應來衡量的,見表2。從練習T1到練習T2,兒童總體行為表現X_B和任務表現X_C顯著增強,其中,效應量的估量值ηp2分別為0.59和0.50。被試內效應檢驗結果顯示,三個交通行為在前后兩次練習中的表現差異顯著,分別是X_B1(ηp2=0.62, p<0.01)、X_B2(ηp2=0.50, P<0.01)和X_B3(ηp2=0.34, p<0.01)。而X_B4(ηp2=0.02, p=0.211)未獲顯著提高,表明過馬路前多次檢查往來交通情況對兒童來說是一個挑戰。并且由于在第一次練習中所有參與者都正確地完成了X_B5行為,所以X_B5行為表現也沒有顯著性變化。此外,表2結果顯示在所有交互效應檢驗中,不同學校和年級的兒童在前后兩次練習中的表現差異均無統計學意義(p≥0.05)。這意味著盡管兒童的家庭背景和年級不同,但他們交通行為表現指標的上升趨勢是大體相似的。
質性訪談數據的分析結果揭示了兒童交通危險行為背后的潛在原因。第一個原因是缺乏具體的路標和交通規則的知識。例如,雖然大多數兒童都能從課本插圖中認識斑馬線,但由于在日常生活中沒有走斑馬線的習慣,很多兒童不能清楚描述斑馬線的安全功能。另外,孩子們只記得課本上的紅色、綠色和黃色三種交通信號燈,卻不知曉交通燈閃爍的含義。第二個原因是對交通規則的誤解。不少孩子誤解了交通規則的目標受眾,他們認為這些規則是針對車輛而不是行人的。以“紅燈停,綠燈行”的規則為例,幾個孩子等待行人綠燈變為紅燈時才過馬路,舉出“紅燈時,汽車會停,所以人們可以過馬路”等理由。這種危險的誤解之前一直沒有引起教師的注意,因此,沒有開展任何干預措施來加以糾正。第三個原因是缺乏成年人的日常監督和指導。如果參與者的父母或祖父母不在身邊陪他們上學或日常散步,他們更有可能獲取錯誤的行人安全知識和危險的行人行為。
五、總結與討論
本研究基于中國兒童交通安全教育教學需求,將全沉浸式VR技術與探究式學習理論有機整合,創設了一種新型的基于VR技術的探究式學習環境。該學習環境遵循五條設計原則,包括真實性原則、開放性原則、關鍵決策點原則、問題空間原則和專家反饋原則,結合VR技術的學習能供性指出交通安全學習環境的具體實現方法,并根據當前VR教學環境中出現的缺乏有效教學設計和教師引導等現狀,進一步提出了一種基于“探索—復盤—練習—反思”的探究式學習模式。以自主設計開發的VR道路交通安全教育項目為例,詳細地介紹了探究式學習理論中情境設計、任務設計、交互設計、反饋設計等教學設計要素在VR學習環境中的具體應用。
為檢驗該探究式學習環境的教學效果,本研究通過準實驗研究驗證了VR技術在識別和改善兒童危險交通行為方面的有效性。在第一次練習中,大多數兒童表現出沖向馬路、綠燈閃爍時過馬路、不檢查交通狀況等危險的交通行為。這些發現與文獻[13-14]一致,7歲至9歲的兒童往往難以合理地選擇過馬路的地點和方式,交通傷亡往往是“沖向馬路”和不注意周圍交通情況的結果。在這項研究中,最初未能表現出正確行為和安全知識的兒童比例很高,這一結果令人擔憂,也凸顯了在全國小學開展有效行人交通安全教育的必要性。在第二次練習中,兒童的交通行為和整體任務表現都有了顯著提高,這與文獻中揭示的VR交通安全教育的有效性是一致的。在兩次練習之間增加的教師復盤引導環節被證明是該教學模式的一個重要組成部分。在該環節中教師針對個人交通行為表現向兒童提供個性化的反饋和指導。
此外,本研究還發現,城鄉環境和年級水平對兒童的交通行為表現和學習效果沒有顯著影響。盡管中國在道路基礎設施、教育資源和兒童信息技術素養等方面存在城鄉差距,在本研究中城市兒童在VR交通安全教育中的表現并沒有超過農民工兒童和農村兒童。原因可能有兩個:(1)居住在繁華的市區并不一定意味著交通安全知識的非正式學習;(2)城鄉兒童都較少接觸VR這種新興技術。盡管一些學者已經探究了學習者年齡段對VR交通安全教育的影響,本研究聚焦7~9歲中國兒童,發現一年級到三年級兒童的交通行為并沒有顯著差異。兒童交通行為表現與正規受教育年限無關,從一個側面也說明當前小學交通安全教育的不足。因此,本文提出并檢驗的基于VR技術的探究式學習環境對改革我國兒童交通安全教育模式具有一定的指導意義。
[參考文獻]
[1] 高媛,劉德建,黃真真,黃榮懷. 虛擬現實技術促進學習的核心要素及其挑戰[J].電化教育研究, 2016,37(10):77-87,103.
[2] 李小平,張琳,趙豐年,陳建珍. 虛擬現實/增強現實下混合形態教學設計研究[J].電化教育研究,2017,38(7):20-25,50.
[3] BURDEA G, COIFFET P. Virtual reality technology[J]. Digital technology & application, 2015, 96(6): 663-664.
[4] DALGARNO B, LEE M J W. What are the learning affordances of 3-D virtual environments?[J]. British journal of educational technology, 2010, 41(1):10-32.
[5] SHIN D H. The role of affordance in the experience of virtual reality learning: technological and affective affordances in virtual reality [J]. Telematics and informatics, 2017, 34(8): 1826-1836.
[6] BECKER S A,BROWN M,DAVIS A,et al. NMC horizon report: 2018 higher education edition[R]. Louisville, CO: EDUCAUSE, 2018.
[7] 趙一鳴,郝建江,王海燕,喬星峰. 虛擬現實技術教育應用研究演進的可視化分析[J].電化教育研究,2016,37(12):26-33.
[8] MERCHANT Z, GOETZ E T, CIFUENTES L, et al. Effectiveness of virtual reality-based instruction on students' learning outcomes in K-12 and higher education: a meta-analysis[J]. Computers & education, 2014, 70(1):29-40.
[9] JONASSEN D. Supporting problem solving in PBL[J]. Interdisciplinary journal of problem-based learning, 2011, 5(2):95-119.
[10] GOEL V, PIROLLI P. Motivating the notion of generic design with information processing theory: the design problem space[J]. AI magazine, 1989, 10(1):19-36.
[11] LUO H, KOSZALKA T A, ARNONE M P, et al. Applying case-based method in designing self-directed online instruction: a formative research study[J]. Educational technology research & development, 2018, 66(2):515-544.
[12] 世界衛生組織.2018全球道路安全現狀報告[R].日內瓦:世界衛生組織,2018.
[13] AMPOFO-BOATENG K, THOMSON J A. Children's perception of safety and danger on the road[J]. British journal of psychology, 2011,82(4):487-505.
[14] TABIBI Z, PFEFFER K. Choosing a safe place to cross the road: the relationship between attention adn identification of safe and dangerous road-crossing sites[J]. Child care health and development, 2003, 29(4):237-244.
猜你喜歡
新教育時代·教師版(2016年35期)2016-12-07 21:25:09
新教育時代·教師版(2016年27期)2016-12-06 15:20:02
新教育時代·教師版(2016年26期)2016-12-06 12:40:08
考試周刊(2016年89期)2016-12-01 13:27:43
新課程·中旬(2016年9期)2016-12-01 09:57:45
新一代(2016年15期)2016-11-16 16:17:50
考試周刊(2016年79期)2016-10-13 23:26:02
考試周刊(2016年79期)2016-10-13 22:17:05
考試周刊(2016年77期)2016-10-09 11:49:00
考試周刊(2016年76期)2016-10-09 09:18:59
