職業技能大賽環境下高職學生“工匠精神”的培育研究
2019-11-23 08:17:08孔榮華
職業 2019年11期
關鍵詞:高職學生
孔榮華
摘 要:在職業技能大賽如火如荼的今天,高職教育既要重視專業技能,又要注重學生工匠精神的培養。本文提出從轉變教育理念和學生的思想觀念、職業技能大賽常態化、實行“1+1+3+5”交替螺旋式的人才培養模式等路徑來培育高職學生的“工匠精神”。
關鍵詞:職業技能大賽 ?高職學生 ?工匠精神
課 題:2018年度山東省教育科學研究課題:職業技能大賽環境下高職學生“工匠精神”的培育研究(18SB008)
成果;2018年青島職業技術學院課題:高職會計專業創新創業能力培育研究(18RW14)階段性成果。
一、我國職業技能大賽的發展現狀
2008年至今,我國職業技能大賽已經走過了11個年頭,從最初由教育部和天津市政府等11家主辦單位到現在的由教育部31家部委和單位共同舉辦的國家級賽事。這一賽事越來越多地受到全國各界的廣泛關注。據統計,2018年在天津、北京等23個賽區舉行,大賽共設82項,其中常規賽項74項,行業特色賽項8項;總參賽選手達到15640人,共有9393人次獲獎,其中一等獎1584人次,二等獎3118人次,三等獎4691人次,再創歷史新高。2018年參賽人數和獲獎人數比2008年翻了近30倍。我國職業技能大賽的影響效應迅速提升,成為各大高職院校展現辦學成果的一項盛事。
越來越多的高職院校開始提出“立德樹人”、“以賽促學、以賽促教、以賽促改”的辦學理念,以技能大賽為引領,鼓勵高職學生和教師積極參加比賽,推動高職專業人才培養模式建設,加強高職學生的工匠精神的培育,從而加快高職教育向縱深發展。青島職業技術學院為了提高師生參與競賽的積極性和主動性,加快高職教育改革步伐,筆者學校于2017年出臺了《關于教師指導學生參加職業技能大賽表彰獎勵辦法(試行)》和《關于教師參加職業技能大賽表彰獎勵辦法(試行)》等的激勵管理制度。筆者學校近幾年在各級各類技能大賽中都取得了不錯的成績。特別是2016—2018三年間,師生共參加并獲獎的一類職業技能大賽89項,有64項是學生參加并獲獎的比賽。筆者學校學生在參加全國職業技能大賽(國家級一類賽)中有18人獲獎,其中一等獎四人,二等獎六人,三等獎八人。近幾年筆者學校一直承辦山東省職業院校技能大賽(高職組)物聯網技術應用賽項和工業機器人技術應用賽項,受到了大賽主辦方和參賽師生的廣泛肯定和一致好評,起到了很好的引領輻射作用,同時也提高了筆者學校的知名度和影響力。
二、職業技能大賽環境下對高職學生“工匠精神”培育的影響
隨著國家政府對技能大賽的重視,越來越多的高職院校和高職學生主動加入技能大賽的隊伍,職業技能大賽的影響力也越來越強。近幾年,我國各大高職院校每年都會組織各專業的學生積極參加職業技能大賽。以筆者學校會計專業為例,曾參加過由教育部等多個部位聯合組織的全國職業院校技能大賽高職組會計技能賽項、全國大學生會計信息化技能大賽、全國大學生創業大賽、“用友新道杯”企業經營模擬沙盤大賽、由山東省教育廳主辦的“福思特杯”大學生會計稅務技能大賽等。并且都取得了不錯的成績,其中會計信息化大賽和創業大賽還獲得了國賽特等獎。在全國職業技能大賽如火如荼的今天,職業技能大賽不僅僅比的是技能,更多的是心理素質、“工匠精神”的較量。現在的比賽大部分是引入國內外先進理念、結合企業實際工作流程來設計的,形式更多的是以團隊來呈現的。這就要求團隊把每個環節和工序都要做好,才能保證最后呈現的是一幅好作品。任何一個細小的環節出現差錯都可能影響團隊的最終結果,所以參賽學生不但個人技能要過關,還要有追求創新思辨、精益求精、庖丁解牛的“工匠精神”。我國職業技能大賽的蓬勃發展在很大程度上推動了高職教育的改革和發展,特別是對目前高職學生“工匠精神”的培養起到了不可忽視的促進作用。
三、職業技能大賽環境下高職學生“工匠精神”的培育路徑
1.轉變高職教育理念和學生的思想觀念,借助思想政治教育播種“工匠精神”
高職教育要以立德樹人為導向,把思想政治教育貫穿于高職人才培養的全過程,把培養學生的“工匠精神”作為思想政治教育的核心來抓。借助思想政治教育在高職學生中播種工匠精神。高職院校要加強學生的職業觀教育,通過思想政治課、人文素質課幫助高職學生樹立良好的職業理想和職業價值觀。引導學生要從“小”事做起,從“螺絲釘”做起,勤抓技能,不忘初心,始終保持一顆“匠人之心”,從而在高職學生心中播種精益求精的“匠人精神”。
2.以職業技能大賽常態化促進“工匠精神”
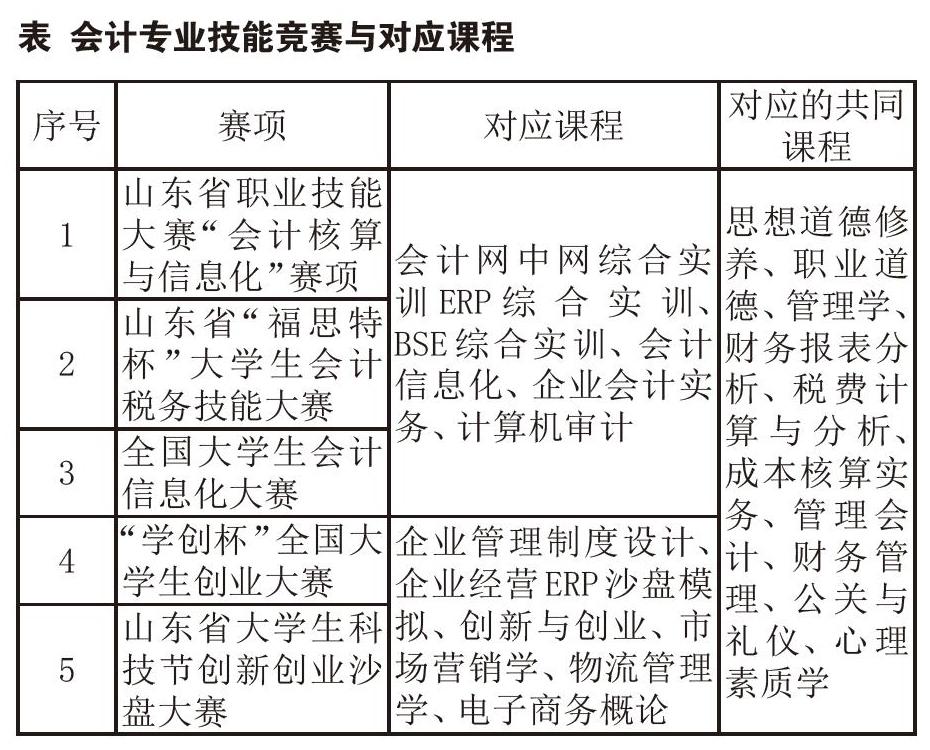
在職業技能大賽越來越火的今天,為打造高職學生的工匠精神,應該將職業技能大賽常態化,把技能競賽的知識和技能分散到對應的課程中去,實現技能競賽和課程無縫對接,從而在教學中把職業技能和職業精神即“工匠精神”進行高度融合。下表是以青島職業技術學院會計專業為例來反映技能競賽與課程的對接,從而實現職業技能大賽在教學中常態化,進而打造高職學生的“工匠精神”。
3.通過“1+1+3+5”交替螺旋式的人才培養模式打造“工匠精神”
“1+1+3+5”交替螺旋式的人才培養模式中,第一個“1”是指大一秋季學期在學校開展基礎理論知識的學習。第二個“1”是指大一春季學期在聯合企業開展研修實踐,結合大一秋季學期所學的基礎理論知識,將理論應用于實踐,采用現代學徒制的方式,完成在合作企業的研修學習,這種形式,既鍛煉了高職學生的動手操作能力,也培養了他們的“工匠精神”。“3”是指大學三年皆是按照前面兩個“1”形式循環交替地進行。“5”是指大學三年五個假期開展不同程度的社會實踐,并且會配備專門指導教師,不定期地進行網上和網下的交流指導,返校后進行答辯,并給予學分認定。這種交替螺旋式的人才培養模式基本實現了理論和實踐零距離對接,有利于提高學生的職業素養,同時也有利于促進高職學生工匠精神的培養,真正做到了職業技能和工匠精神的完美融合。
4.結合“雙創”教育和“雙創”技能競賽,引入實體經濟進校園,提升“工匠精神”
受“大眾創業萬眾創新”形勢的影響,近幾年全國掀起了創新創業的熱潮,上到國家下至個人都踴躍參與創新創業,高職院校也不例外。高職院校積極響應國家政策,將創新創業教育引入到高職學生的人才培養方案中來,同時高職院校為了鼓勵學生參與各級各部門組織的創新創業技能競賽,還制定了相關措施和激勵政策。在“雙創”教育和“雙創”技能競賽蓬勃發展的今天,為了更好地培養高職學生的“工匠精神”,可以引入實體經濟進校園。讓高職師生成為校園實體經濟的主體,這樣既有利于開展“雙創”教育,又有利于開展“雙創”技能競賽。學生的主動性強,進而激發高職學生的內驅力,他們會主動提高自身的專業技能和職業精神,最終在自己的專業領域做到精益求精、完美無瑕,從而達到高職學生職業技能和“工匠精神”完美融合的培養。
5.厚植高職校園文化和社團文化,融合“工匠精神”
高職校園文化和社團文化作為一種教育文化氛圍,是培育工匠精神的有效載體。用工匠精神來潤色校園社團文化,讓工匠精神真正扎根融合高職校園。高職院校可以根據高職學生的特性,圍繞工匠精神,科學合理地設計和開展富含工匠精神的校園和社團文化活動。
6.搭建“能工巧匠”的雙師隊伍平臺,為培育“工匠精神”提供保障
為進一步深化產教融合、弘揚新時代大國工匠精神、充分發揮行業技能大師的示范引領作用,青島職業技術學院于2018年分別成立了大國工匠、勞動模范、國家級名師工作室。筆者學校聘請了黨的十九大代表、全國勞動模范、青島港“進軍品牌”的創造者皮進軍為兼職教授,聘請全國技術能手、泰山產業領軍人才、中車青島四方機車車輛股份有限公司高級技師周勇為兼職教授。自大國工匠、勞動模范工作室成立后,筆者學校先后組織教師和學生赴青島港參觀學習。筆者學校師生接受了來自吃苦耐勞的“勞模精神”、對待工作一絲不茍精益求精的“工匠精神”以及刻苦鉆研、提高效率的“創新精神”的激勵和鼓舞。同時兼職教授也會走入課堂,讓學生親自感受一下大國工匠的魅力。因此,應好好學習和傳承工匠精神,力求精益求精,努力追求卓越,傳承和發揚勞模精神和匠心品質,進一步搭建起校企合作的橋梁,實現學院與企業優勢互補、資源共享和互惠共贏。
參考文獻:
[1]金璐,任占營.依托技能大賽培育“工匠精神”的實踐與探索[J].中國職業技術教育,2017(10).
[2]何偉,李麗.新常態下職業教育中“工匠精神”培育研究[J].職業技術教育,2017(4).
(作者單位:青島職業技術學院)
猜你喜歡
考試周刊(2016年85期)2016-11-11 01:32:26
考試周刊(2016年84期)2016-11-11 00:12:54
人間(2016年28期)2016-11-10 23:05:02
知音勵志·社科版(2016年8期)2016-11-05 03:28:48
文藝生活·中旬刊(2016年10期)2016-11-04 06:12:38
現代經濟信息(2016年19期)2016-10-20 19:42:47
中國市場(2016年36期)2016-10-19 05:11:25
科學與財富(2016年28期)2016-10-14 05:41:41
考試周刊(2016年77期)2016-10-09 12:05:08
企業導報(2016年11期)2016-06-16 13:41:08